One of our interests is to investigate the dynamics of traffic flow through the microscopic properties of each vehicle in traffic. We mainly focus on microscopic models since we can easily incorporate human reaction delays in these models. What we mean by delay here is the amount of time it takes to make a decision (e.g. braking) upon receiving a stimulus from outside the vehicle. In this sense, there are two main sources of delays while driving
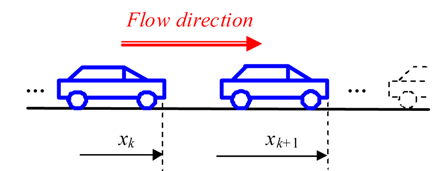
In our approach, microscopic models are based on following one or more leader vehicles, and this suggests a way of dynamically coupling the vehicles with a unique feature that coupling exists only between the vehicles upstream (opposite direction) of the traffic flow. This is a natural consequence of following in general the vehicles ahead but not behind. We again combine the traffic flow characterization problem with our expertise on delay differential equations, graphs, frequency sweeping techniques and stability charts. With these unique tools in hand, we investigate the following open problems:
We see the impacts of our research in the following areas
|